
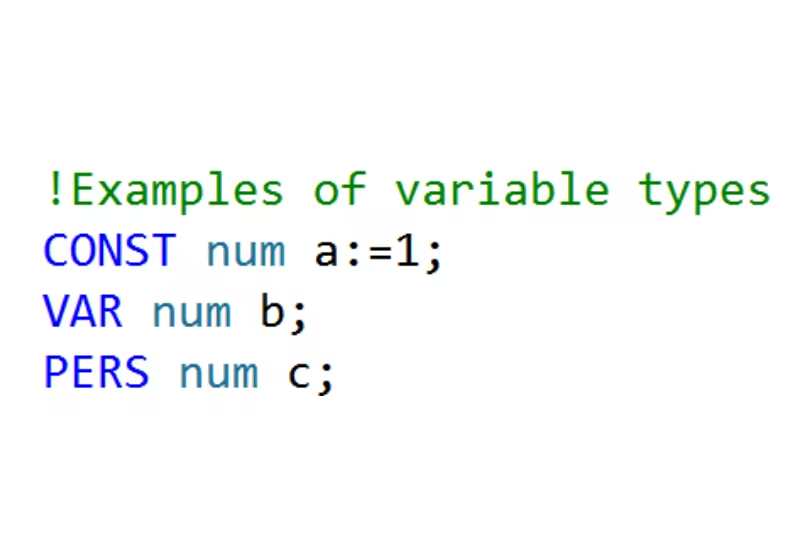
ABB机器人数据声明三种类型
详解 ABB RAPID 数据类型:CONST (常量,不可改)、VAR (变量,指针重置丢失)、PERS (可变量,持久保持,可跨任务)。理解三者区别,优化机器人程序。
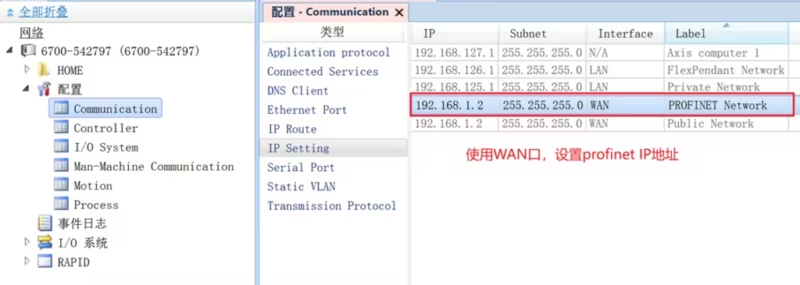
ABB机器人nfs、socket、robotstudio远程及profinet共用X6-WAN口
配置指南:使 ABB 机器人 X6 WAN 口同时支持 Profinet 和 NFS/Socket/RobotStudio 连接。详解公共网络设置、IP规则、所需选项 (616-1, 614-1) 及常见问题。
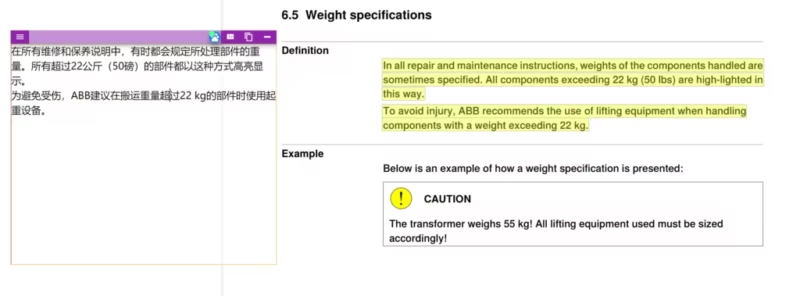
阅读英语文档的翻译软件–CopyTranslator
机器人/PLC工程师还在愁英语PDF翻译?试试CopyTranslator!开源无广告、轻量级,Ctrl+C复制即翻译,支持更换翻译源。告别臃肿,高效阅读。

ABB通讯-profinet传输正负整数及浮点数
修正版 ABB RAPID 代码:实现 Profinet 传输浮点数和正负整数 (Float/DINT/INT/SINT)。解决机器人发送32位数据错误,提供字节拆分发送 senddata 示例。

ABB通讯-profinet主站与西门子s7-200smart通讯
使用 RobotStudio (替代旧工具) 配置 ABB 机器人为 Profinet 主站,连接西门子 S7-200 SMART PLC。详解 GSDML 生成导入与 RobotStudio 设置步骤。
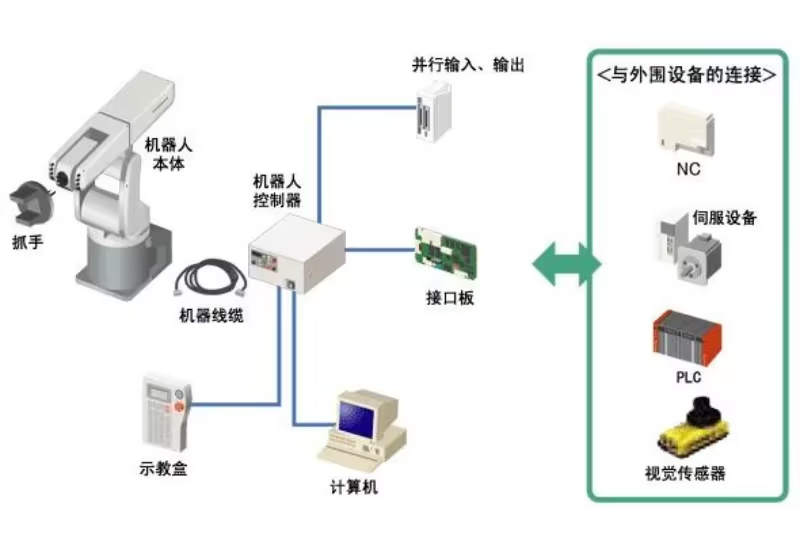
工业机器人系统介绍及ABB、KUKA、FANUC选型比较
解析工业机器人系统架构,详细对比 ABB、KUKA、FANUC 在控制器 (IRC5/KR C4/R-30iA)、系统 (VxWorks)、编程 (Rapid/KRL/KAREL)、开放性及优缺点,为机器人选型提供参考。
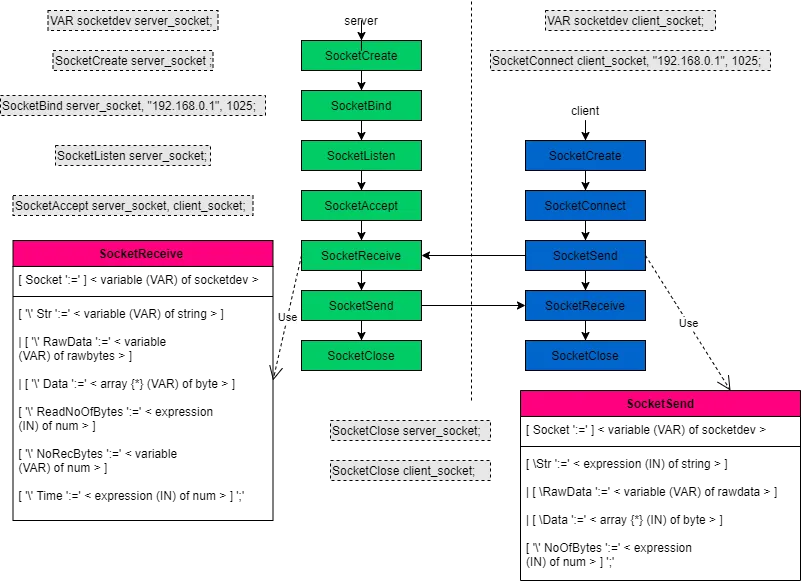
ABB机器人socket通讯的3种方式及解析详解
详解 ABB Socket通讯3种方式:用 RAPID 处理 String(字符串), Byte(字节数组), RawData(二进制)。含代码示例,重点解析 RawData 收发(包头/分包)机制。
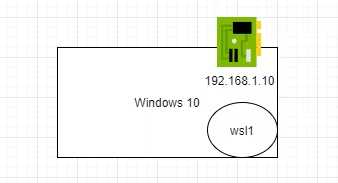
wsl安装ROS引导ABB机器人运动
指南:使用 WSL1 (网络配置比WSL2更简单) 安装 ROS,成功通过 127.0.0.1 连接 ABB RobotStudio 并引导机器人运动。解决在 Windows 上运行 ROS 与 ABB 仿真的通讯难题。

ROS引导ABB机器人运动仿真测试
教程:配置 VMware (仅主机模式) + Ubuntu 18.04 + ROS,实现对 ABB RobotStudio 仿真机器人的运动控制。含网络设置、abb_driver 及 Catkin 工作区配置详解。
ROS机器人操作系统介绍及wsl2安装ROS
介绍 ROS 机器人操作系统及其起源,并提供 Windows 下 WSL2 (Ubuntu 18.04) 安装 ROS Melodic 的详细步骤,含 MobaXterm 图形界面配置及测试。







一位 WordPress 评论者10天前0
您好,这是一条评论。若需要审核、编辑或删除评论,请访问仪表盘的评论界面。评论者头像来自 Gravatar。